Multiple impulses transfer between Earth and Venus¶
This example demonstrates the use of the class pl2pl_N_impulses available from the trajopt module to assemble an unconstrained optimization problem representing an impulsive transfer between the Earth and Venus. Multiple impulses are allowed (the optimal number is in this case 3) allowing to study the complexification of the objective function landscape as the number of impulses increase.
[1]:
# Imports
import pykep as pk
import pygmo as pg
import numpy as np
# Plotting imports
import matplotlib as mpl
from mpl_toolkits.mplot3d import Axes3D
import matplotlib.pyplot as plt
[2]:
# We define the optimization problem
udp = pk.trajopt.pl2pl_N_impulses(
start=pk.planet.jpl_lp('earth'),
target=pk.planet.jpl_lp('venus'),
N_max=3,
tof=[100., 1000.],
vinf=[0., 4],
phase_free=False,
multi_objective=False,
t0=[pk.epoch(0), pk.epoch(1000)])
# All pykep problems in the module trajopt are compatible with pygmo.
# So we create a pygmo problem from the pykep udp (User Defined Problem)
prob = pg.problem(udp)
print(prob)
Problem name: <class 'pykep.trajopt._pl2pl_N_impulses.pl2pl_N_impulses'>
C++ class name: pybind11::object
Global dimension: 7
Integer dimension: 0
Fitness dimension: 1
Number of objectives: 1
Equality constraints dimension: 0
Inequality constraints dimension: 0
Lower bounds: [0, 100, 0.001, 0, 0, ... ]
Upper bounds: [1000, 1000, 0.999, 1, 1, ... ]
Has batch fitness evaluation: false
Has gradient: false
User implemented gradient sparsity: false
Has hessians: false
User implemented hessians sparsity: false
Fitness evaluations: 0
Thread safety: none
[3]:
# Here we define the solution strategy, which in this simple case is to use
# Covariance Matrix adaptation Evolutionary Strategy (CMA-ES)
uda = pg.cmaes(gen=1000, force_bounds = True)
algo = pg.algorithm(uda)
# Here we activate some degree of screen output (will only show in the terminal)
algo.set_verbosity(10)
# We construct a random population of 20 individuals (the initial guess)
pop = pg.population(prob, size = 20, seed = 123)
# We solve the problem
pop = algo.evolve(pop)
[4]:
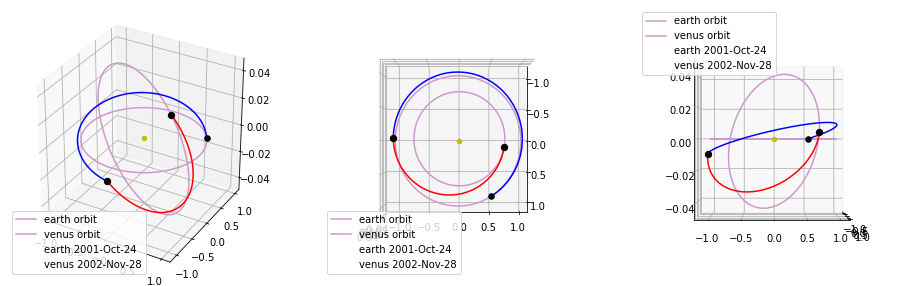
# Plot our trajectory
fig = plt.figure(figsize = (16,5))
ax1 = fig.add_subplot(1, 3, 1, projection='3d')
ax2 = fig.add_subplot(1, 3, 2, projection='3d')
ax3 = fig.add_subplot(1, 3, 3, projection='3d')
ax1 = udp.plot(pop.champion_x, axes = ax1)
ax2 = udp.plot(pop.champion_x, axes = ax2)
ax2.view_init(elev=90, azim=0)
ax3 = udp.plot(pop.champion_x, axes = ax3)
ax3.view_init(elev=0, azim=0)
[5]:
# Inspect
udp.pretty(pop.champion_x)
Total DV (m/s): 6363.335847933547
Dvs (m/s): [508.3218553605975, 2609.214286403859, 3245.79970616909]
Tofs (days): [250.1799490642077, 149.6145171317176]