Indirect methods II (minimum time, Cartesian)#
This notebook presents a minimum-time low-thrust transfer solved with an indirect method in Cartesian coordinates.
We derive a TPBVP (Two-Point Boundary Value Problem) from Pontryagin’s Minimum Principle (PMP), then solve it with single shooting.
Most symbolic and differentiation steps can be automated with heyoka, while pykep already exposes production-ready building blocks.
Compared with the fixed-time minimum-propellant case, the key difference is the objective function: for time optimality the PMP solution gives full throttle (\(u=1\)) under the assumptions used here, so homotopy on \(\epsilon\) is not required since the resulting optimal thrust profile is smooth.
For comparison with the fixed-time mass-optimal formulation, see Cartesian mass-optimal notebook. For the equinoctial counterpart, see equinoctial time-optimal notebook.
import pykep as pk
import numpy as np
import heyoka as hy
import pygmo as pg
import pygmo_plugins_nonfree as ppnf
import time
from matplotlib import pyplot as plt
Manual construction of the TPBVP#
We consider the dynamics of a spacecraft moving around a massive primary and equipped with a low-thrust propulsion system capable of delivering constant maximum thrust \(T_{\max}\):
with control constraints \(0 \le u \le 1\) and \(\|\hat{\mathbf i}\|=1\), where \(c_1=T_{\max}\) and \(c_2=I_{sp}g_0\).
Following PMP, we introduce one costate per state variable. Using heyoka as a symbolic manipulator, we define symbols for all time-dependent quantities:
# State variables
x, y, z, vx, vy, vz, m = hy.make_vars("x", "y", "z", "vx", "vy", "vz", "m")
# Costate variables
lx, ly, lz, lvx, lvy, lvz, lm = hy.make_vars(
"lx", "ly", "lz", "lvx", "lvy", "lvz", "lm"
)
# Control variables: throttle and thrust direction
u, ix, iy, iz = hy.make_vars("u", "ix", "iy", "iz")
To keep the derivation readable, we define compact expressions and group state/costate components into vectors.
# Reusable scalar expressions
r3 = (x**2 + y**2 + z**2) ** (1.5)
lv_norm = hy.sqrt(lvx**2 + lvy**2 + lvz**2)
# Vectorized groupings for compact Hamiltonian expressions
lr = np.array([lx, ly, lz])
lv = np.array([lvx, lvy, lvz])
r = np.array([x, y, z])
v = np.array([vx, vy, vz])
i_vers = np.array([ix, iy, iz])
For API consistency with the mass-optimal notebook, we keep an \(\epsilon\) slot in heyoka parameters (hy.par[3]), but it is not used in this time-optimal formulation.
The performance index is
and the corresponding minimizer is already smooth in this setting (no continuation parameter is needed). Parameter ordering is kept as \([\mu, c_1, c_2, \epsilon, \lambda_0]\), with \(c_1=T_{\max}\) and \(c_2=I_{sp}g_0\).
The dynamics can then be written as:
# Dynamics
fr = v
fv = hy.par[1] * u / m * i_vers - (hy.par[0] / r3) * r
fm = -hy.par[1] / hy.par[2] * u
We introduce the Hamiltonian (\(\mathbf x\) is the full state, \(\boldsymbol\lambda\) the full costate, and \(\mathbf u\) the control tuple):
# Hamiltonian
H_full = lr @ fr + lv @ fv + lm * fm + hy.par[4] * hy.par[1] / hy.par[2]
And write the resulting Hamiltonian system:
# Augmented equations of motion
rhs = [
hy.diff(H_full, var)
for var in [lx, ly, lz, lvx, lvy, lvz, lm, x, y, z, vx, vy, vz, m]
]
for j in range(7, 14):
rhs[j] = -rhs[j]
Pontryagin’s minimum principle requires pointwise minimization of the Hamiltonian over the admissible control set
with \(\quad\mathcal U = \{(u,\hat{\mathbf i})\,|\,0 \le u \le 1,\ \|\hat{\mathbf i}\|=1\}\).
In this time-optimal case, the minimizer is:
# We apply Pontryagin minimum principle (primer vector and u^* = 1.)
argmin_H_full = {
ix: -lvx / lv_norm,
iy: -lvy / lv_norm,
iz: -lvz / lv_norm,
u: hy.expression(1.)
}
Note
This is the key difference with respect to the fixed-time mass-optimal formulation: the optimal thrust direction has the same primer-vector structure, while the throttle is saturated at full thrust (\(u=1\)) under the assumptions used here.
After substitution, controls become explicit functions of state and costate and the augmented dynamics close as
rhs = hy.subs(rhs, argmin_H_full)
# We also build the Hamiltonian as a function of the state / co-state only
# (i.e. no longer of controls now solved thanks to the minimum principle)
H = hy.subs(H_full, argmin_H_full)
The next block instantiates the heyoka integrator for the augmented dynamics and helper evaluators used in the shooting implementation.
# We compile the Hamiltonian into a C function (to be called with pars = [mu, c1, c2, eps, l0])
H_func = hy.cfunc([H], [x, y, z, vx, vy, vz, m, lx, ly, lz, lvx, lvy, lvz, lm])
# We compile also the thrust direction
i_vers_func = hy.cfunc(
[argmin_H_full[ix], argmin_H_full[iy], argmin_H_full[iz]], [lvx, lvy, lvz]
)
# And we compile the dynamics for x,y,z,vx,vy,vz,lm.
# This is needed as to compute the analytical gradents with respect to tof. (not there for fixed time problems)
dyn_func = hy.cfunc([rhs[0], rhs[1],rhs[2],rhs[3],rhs[4],rhs[5],rhs[13]], [x, y, z, vx, vy, vz, m, lx, ly, lz, lvx, lvy, lvz, lm])
# We assemble the Taylor adaptive integrator
full_state = [x, y, z, vx, vy, vz, m, lx, ly, lz, lvx, lvy, lvz, lm]
sys = [(var, dvar) for var, dvar in zip(full_state, rhs)]
ta = hy.taylor_adaptive(sys)
aug_sys = hy.var_ode_sys(sys, [lx, ly, lz, lvx, lvy, lvz, lm, hy.par[4]], 1)
ta_var = hy.taylor_adaptive(aug_sys, tol=1e-16, compact_mode=True)
Constructing the TPBVP using pykep#
For this formulation, pykep provides pre-assembled components equivalent to the objects derived above.
In practice, these are the preferred tools for robust workflows, while the manual derivation remains valuable for understanding and debugging.
# The Taylor integrator
ta = pk.ta.get_pc(1e-16, pk.optimality_type.TIME)
# The Variational Taylor integrator (8 digits generally enough)
ta_var = pk.ta.get_pc_var(1e-8, pk.optimality_type.TIME)
# The Hamiltonian
H_func = pk.ta.get_pc_H_cfunc(pk.optimality_type.TIME)
# The switching function (always negative, not useful for this time optimal case, but still)
SF_func = pk.ta.get_pc_SF_cfunc(pk.optimality_type.TIME)
# The magnitude of the throttle (always 1, but still)
u_func = pk.ta.get_pc_u_cfunc(pk.optimality_type.TIME)
# The thrust direction
i_vers_func = pk.ta.get_pc_i_vers_cfunc(pk.optimality_type.TIME)
# The dynamics cfunc
dyn_func = pk.ta.get_pc_dyn_cfunc(pk.optimality_type.TIME)
Solving in single shooting#
We use, as a test case, a simple Earth-Mars transfer and start from a relatively high thrust level \(T_{\max}\).
Later, we apply continuation on \(T_{\max}\) to explore lower-thrust solutions with more revolutions.
We instantiate a single shooting problem for this case using the UDP (User Defined Problem in the pygmo jargon) provided by pykep:
# Factory for the pygmo udp.
def prob_factory(T_max, tof_guess):
udp = pk.trajopt.pontryagin_cartesian_time(
source=pk.planet(pk.udpla.jpl_lp("earth")),
target=pk.planet(pk.udpla.jpl_lp("mars")),
tof_guess=tof_guess,
t0 = pk.epoch(400),
lambda0 = None, # We normalize the costates
T_max=T_max,
Isp=3000,
m0=1500,
L=pk.AU,
MU=pk.MU_SUN,
MASS=1500,
with_gradient=True,
taylor_tolerance=1e-8, # lower tolerance for the Taylor integrator since the problem is easy
taylor_tolerance_var=1e-6
)
prob = pg.problem(udp)
prob.c_tol = 1e-6
return prob
prob = prob_factory(0.6, 250)
sparsity = prob.gradient_sparsity()
udp = prob.extract(pk.trajopt.pontryagin_cartesian_time)
The resulting TPBVP can be solved with interior-point optimizers or root-finding methods on boundary residuals.
Here we use IPOPT (via pagmo) and a MINPACK wrapper (via scipy.optimize.root).
ip = pg.ipopt()
#ip.set_numeric_option("tol", 1e-1) # Change the relative convergence tolerance
ip.set_integer_option("max_iter", 200) # Change the maximum iterations
ip.set_integer_option("print_level", 0) # Makes Ipopt unverbose
ip.set_string_option(
"sb", "yes"
)
ip.set_string_option(
"nlp_scaling_method", "none"
) # Removes any scaling made in auto mode
ip.set_string_option(
"mu_strategy", "adaptive"
) # Alternative is to tune the initial mu value
ipopt200 = pg.algorithm(ip)
ip.set_integer_option("max_iter", 20) # Change the maximum iterations
ipopt20 = pg.algorithm(ip)
MINPACK is available via scipy and is missing in the current pygmo version, but we can quickly provide a wrapper as a UDA:
class my_solver:
def __init__(self, gradient):
self.gradient = gradient
def evolve(self, pop: pg.population):
from scipy.optimize import root
prob = pop.problem
x0 = pop.champion_x
n = prob.get_nx()
if self.gradient:
def dense_grad(x):
G = np.zeros((n,n))
G[sparsity[:, 0], sparsity[:, 1]] = prob.gradient(x)
return G.reshape(n,n)
res = root(lambda x: [0] + list(prob.fitness(x)[1:]), x0, method="hybr", tol=1e-8, options = {"factor": 1., "diag": [1]*(n)}, jac=dense_grad) # factor=1 is very important for convergence
else:
res = root(lambda x: [0] + list(prob.fitness(x)[1:]), x0, method="hybr", tol=1e-8, options = {"factor": 1., "diag": [1]*(n)}) # factor=1 is very important for convergence
pop.set_x(0, res["x"])
return pop
def get_name(self):
return "Minpack hybrd routine"
minpack = pg.algorithm(my_solver(False))
minpack_g = pg.algorithm(my_solver(True))
We use a multi-start strategy, which is generally good practice for indirect shooting due to sensitivity to initialization. In this case convergence is often immediate, but we still report robustness.
def multistart(algo, n_trials=30):
masses = []
xs = []
total_time = 0.0
success = 0.
for i in range(n_trials):
pop = pg.population(udp,1)
time_start = time.time()
pop = algo.evolve(pop)
time_end = time.time()
total_time += time_end - time_start
if prob.feasibility_f(pop.champion_f):
print(".", end="")
udp.fitness(pop.champion_x)
xs.append(pop.champion_x)
masses.append(udp.ta.state[6])
success+=1
else:
print("x", end="")
print(f"\nFinal mass is: {masses[0]*udp.MASS}")
print(f"Total time to success: {total_time:.3f} seconds")
print(f"Number of successes: {success} over {n_trials} trials ({success/n_trials*100:.1f} %)")
return pop
pop = multistart(ipopt200, 10)
******************************************************************************
This program contains Ipopt, a library for large-scale nonlinear optimization.
Ipopt is released as open source code under the Eclipse Public License (EPL).
For more information visit https://github.com/coin-or/Ipopt
******************************************************************************
.x........
Final mass is: 1049.4338611669273
Total time to success: 6.934 seconds
Number of successes: 9.0 over 10 trials (90.0 %)
pop = multistart(minpack_g, 10)
...x.x.xx.
Final mass is: 1049.4338612158242
Total time to success: 0.214 seconds
Number of successes: 6.0 over 10 trials (60.0 %)
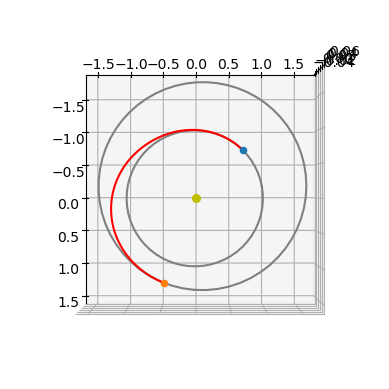
We now inspect the trajectory geometry obtained by the solver.
ax3D = udp.plot(pop.champion_x, N=2000)
ax3D.view_init(90, 0)
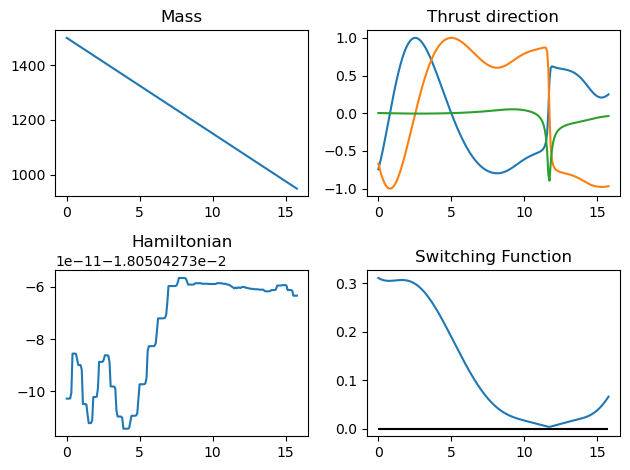
The throttle is always on as dictated by the PMP as the trajectory is time optimal.
udp.plot_misc(pop.champion_x, figsize = (8,5));
Homotopy#
For this time-optimal formulation, continuation on \(\epsilon\) is not needed. Here we instead use continuation on \(T_{\max}\) to track solutions toward the very-low-thrust regime.
Exponential homotopy on \(T_{\max}\)#
We decrease \(T_{\max}\) geometrically and use the converged decision vector at each step as predictor for the next step. If convergence fails, we backtrack on \(T_{\max}\) and continue from the last successful solution.
The following block implements exponential continuation on \(T_{\max}\).
algo=minpack_g
import time
from copy import deepcopy
# No initial guess
first = True
T_max = 0.6
tof_guess_days = 250
decrease_factor = 0.95
# Solve
while True:
# Set the current epsilon in the udp and construct a problem
# (a copy here will be made, so that the udp inside the prob object
# is a different udp)
prob = prob_factory(T_max, tof_guess_days)
udp = prob.extract(pk.trajopt.pontryagin_cartesian_time)
# First time looks for a solution, then it continues it
if first:
# Creates a random ic population
pop = pg.population(prob, 1)
# Starts the time to profile the homotopy time only
# (i.e. we exclude the effort to find the first valid traj)
tstart_tot = time.time()
else:
# Use predicted new chromosome
pop = pg.population(prob)
pop.push_back(predicted_chromosome)
# Evolve
tstart = time.time()
pop = algo.evolve(pop)
tend = time.time()
# Compute constraint violation norm
err = np.linalg.norm(pop.champion_f[1:])
# If we find a feasible solution (either the first or a continued one, we log and start the predictor)
if prob.feasibility_f(pop.champion_f):
if first:
# We decrease the number of iterations as to favour quick multistarts
print("Initial solution found, starting homotopy... ")
#algo=ipopt20
first = False
tof_guess_days = pop.champion_x[-1] * udp.TIME * pk.SEC2DAY
udp.fitness(pop.champion_x)
print(
f". Success!! | Error: {err:.2e} | CPU time: {tend-tstart:.2e} | T_max = {T_max:.4e} | Tof = {pop.champion_x[-1]*udp.TIME*pk.SEC2DAY:4e} | mass = {udp.ta.state[6]*udp.MASS:.4}"
, end = "\r", flush=True)
# Save decision vector for current epsilon (which will be used as an initial guess in the next iteration)
predicted_chromosome = deepcopy(pop.champion_x)
best_T_max = T_max
# Save current epsilon (needed if iteration fails)
T_max_previous = T_max
# Decrease epsilon
T_max = T_max * decrease_factor
# Stopping condition (desired epsilon reached)
if T_max < 0.2:
udp.fitness(pop.champion_x)
print(
f". Success!! | Error: {err:.2e} | CPU time: {tend-tstart:.2e} | T_max = {T_max:.4e} | Tof = {pop.champion_x[-1]*udp.TIME*pk.SEC2DAY:4e} | mass = {udp.ta.state[6]*udp.MASS:.4}"
)
break
else:
udp.fitness(pop.champion_x)
print(
f"x Failedd!! | Error: {err:.2e} | CPU time: {tend-tstart:.2e} | T_max = {T_max:.4e} | Tof = {pop.champion_x[-1]*udp.TIME*pk.SEC2DAY:4e} | mass = {udp.ta.state[6]*udp.MASS:.4}"
, end = "\r", flush=True)
# If first iteration fails, try again with different initial guess
if first:
pass
# T_max is too small, we need to increase it (halfway between previous and current)
else:
T_max = T_max + abs(T_max_previous - T_max) / 2
tend_tot = time.time()
print(f"Total CPU time: {tend_tot - tstart_tot:.2e}")
# Need to call the fitness once as to use the internal ta in the udp
udp.fitness(pop.champion_x)
print("mass", udp.ta.state[6]*udp.MASS)
print("time", pop.champion_x[-1]*udp.TIME*pk.SEC2DAY)
Initial solution found, starting homotopy...
. Success!! | Error: 1.57e-08 | CPU time: 2.16e-02 | T_max = 1.9425e-01 | Tof = 9.172452e+02 | mass = 949.2e+03
Total CPU time: 1.29e+00
mass 949.205169027
time 917.245217762
A larger decrease factor would reduce total runtime only if predictor quality remains sufficient for convergence.
With a previous-solution predictor, aggressive reductions in \(T_{\max}\) may fail and trigger backtracking.
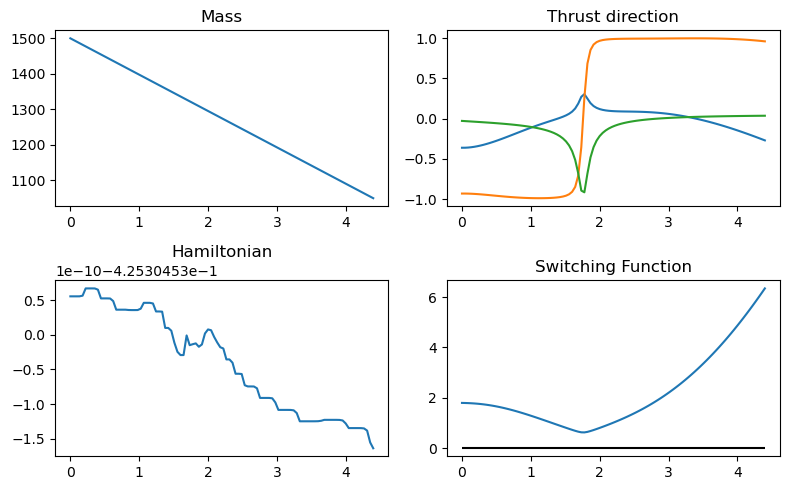
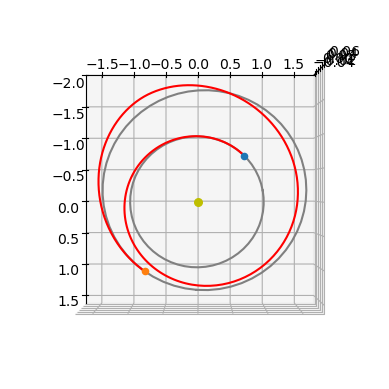
We now plot the converged solution.
ax3D = udp.plot(pop.champion_x, N=300)
ax3D.view_init(90, 0)
udp.plot_misc(pop.champion_x, N=200);