Indirect methods III (minimum propellant, fixed time, MEE)#
This notebook solves the same fixed-time minimum-propellant problem as the Cartesian mass-optimal case, but using modified equinoctial elements (MEE).
For comparison, see the Cartesian mass-optimal notebook. The time-optimal counterpart in MEE is in equinoctial time-optimal notebook.
import pykep as _pk
import numpy as np
import heyoka as hy
import pygmo as pg
import pygmo_plugins_nonfree as ppnf
import time
from matplotlib import pyplot as plt
---------------------------------------------------------------------------
ModuleNotFoundError Traceback (most recent call last)
Cell In[1], line 5
1 import pykep as _pk
2 import numpy as np
3 import heyoka as hy
4 import pygmo as pg
----> 5 import pygmo_plugins_nonfree as ppnf
6 import time
7
8 from matplotlib import pyplot as plt
ModuleNotFoundError: No module named 'pygmo_plugins_nonfree'
Manual construction of the TPBVP#
We consider a spacecraft of mass \(m\) under central gravity with parameter \(\mu\), equipped with low-thrust propulsion of maximum thrust \(T_{\max}=c_1\) and effective exhaust velocity \(c_2=I_{sp}g_0\).
The state is \([p,f,g,h,k,L,m]^T\), where \([p,f,g,h,k,L]^T\) are prograde modified equinoctial elements (see Elements page).
The controlled dynamics are
with \(w = 1 + f\cos L + g\sin L\), \(s^2 = 1 + h^2 + k^2\), control constraints \(0\le u\le1\), and \(\hat{\mathbf i}_{\tau}=[i_r,i_t,i_n]^T\) such that \(\|\hat{\mathbf i}_{\tau}\|=1\).
A compact form is
where
and
Using heyoka, we now define symbolic variables for states, controls, and costates.
# State variables
p, f, g, h, k, L, m = hy.make_vars("p", "f", "g", "h", "k", "L", "m")
# Costate variables
lp, lf, lg, lh, lk, lL, lm = hy.make_vars(
"lp", "lf", "lg", "lh", "lk", "lL", "lm"
)
# Control variables: throttle and RTN thrust direction
u, i_r, i_t, i_n = hy.make_vars("u", "ir", "it", "in")
To keep the derivation readable, we define compact expressions and vectorized groupings.
# Reusable scalar expressions
w = 1 + f * hy.cos(L) + g * hy.sin(L)
s2 = 1 + h * h + k * k
B = np.array(
[
[0, 2 * p / w, 0.0],
[
hy.sin(L),
((1 + w) * hy.cos(L) + f) / w,
-g / w * (h * hy.sin(L) - k * hy.cos(L)),
],
[
-hy.cos(L),
((1 + w) * hy.sin(L) + g) / w,
f / w * (h * hy.sin(L) - k * hy.cos(L)),
],
[0, 0, s2 / w / 2.0 * hy.cos(L)],
[0, 0, s2 / w / 2.0 * hy.sin(L)],
[0, 0, 1.0 / w * (h * hy.sin(L) - k * hy.cos(L))],
]
) * hy.sqrt(p / hy.par[0])
D = np.array([0.0, 0.0, 0.0, 0.0, 0.0, hy.sqrt(hy.par[0] / p / p / p) * w * w])
i_vers = np.array([i_r, i_t, i_n])
lx = np.array([lp, lf, lg, lh, lk, lL])
The dynamics can then be written as:
# Dynamics
fx = np.dot(B, i_vers) * u * hy.par[1] / m + D
fm = - hy.par[1] / hy.par[2] * u
We introduce the regularized Hamiltonian (\(\mathbf x\) is the full state and \(\boldsymbol\lambda\) the full costate):
The logarithmic barrier regularizes throttle switching and recovers near bang-bang behavior as \(\epsilon\to0^+\).
# Regularized Hamiltonian
H_full = (lx @ fx + lm * fm + hy.par[4] * hy.par[1] / hy.par[2] * (u - hy.par[3] * hy.log(u * (1 - u))))
# Switching function rho from first-order optimality conditions
BTlam = B.T@lx
BTlam_norm = hy.sqrt(BTlam @ BTlam)
rho = 1. - hy.par[2] * BTlam_norm / m / hy.par[4] - lm / hy.par[4]
Constants are passed in heyoka as \([\mu, c_1, c_2, \epsilon, \lambda_0]\), with \(c_1=T_{\max}\) and \(c_2=I_{sp}g_0\). Hence \(\frac{c_1}{c_2}=\frac{T_{\max}}{I_{sp}g_0}\).
And write the resulting Hamiltonian system:
# Augmented equations of motion
rhs = [
hy.diff(H_full, var)
for var in [lp, lf, lg, lh, lk, lL, lm, p, f, g, h, k, L, m]
]
for j in range(7, 14):
rhs[j] = -rhs[j]
Pontryagin’s minimum principle requires pointwise minimization over admissible controls
with \(\mathcal U=\{(u,\hat{\mathbf i}_{\tau})\,|\,0\le u\le 1,\ \|\hat{\mathbf i}_{\tau}\|=1\}\).
For this problem, the minimizer is:
# PMP minimizer: RTN thrust direction anti-parallel to B^T lambda
# Smoothed throttle law from regularized Hamiltonian minimization
argmin_H_full = {
i_r: -BTlam[0] / BTlam_norm,
i_t: -BTlam[1] / BTlam_norm,
i_n: -BTlam[2] / BTlam_norm,
u: 2.
* hy.par[3]
/ (rho + 2 * hy.par[3] + hy.sqrt(rho * rho + 4. * hy.par[3] * hy.par[3])),
}
After substitution, controls become smooth functions of state and costate. The TPBVP is then solved on the closed augmented dynamics.
rhs = hy.subs(rhs, argmin_H_full)
# We also build the Hamiltonian as a function of the state / co-state only
# (i.e. no longer of controls now solved thanks to the minimum principle)
H = hy.subs(H_full, argmin_H_full)
The next block instantiates the heyoka integrator and helper evaluators used for diagnostics and shooting.
# Compile Hamiltonian evaluator (pars = [mu, c1, c2, eps, lambda0])
H_func = hy.cfunc([H], [p, f, g, h, k, L, m , lp, lf, lg, lh, lk, lL, lm ])
# Compile optimal throttle evaluator
u_func = hy.cfunc(
[argmin_H_full[u]], [p, f, g, h, k, L, m , lp, lf, lg, lh, lk, lL, lm ]
)
# Compile switching-function evaluator
rho_func = hy.cfunc([rho], [p, f, g, h, k, L, m , lp, lf, lg, lh, lk, lL, lm ])
# Compile optimal RTN thrust-direction evaluator
i_vers_func = hy.cfunc(
[argmin_H_full[i_r], argmin_H_full[i_t], argmin_H_full[i_n]], [p, f, g, h, k, L, m , lp, lf, lg, lh, lk, lL, lm ]
)
# Assemble Taylor adaptive integrator
full_state = [p, f, g, h, k, L, m , lp, lf, lg, lh, lk, lL, lm ]
sys = [(var, dvar) for var, dvar in zip(full_state, rhs)]
ta = hy.taylor_adaptive(sys, state=[1.0] * 14, compact_mode=True)
var_sys = hy.var_ode_sys(sys, args = [lp,lf,lg,lh,lk,lL,lm, hy.par[4]])
ta = hy.taylor_adaptive(var_sys, compact_mode=True)
Constructing the TPBVP using pykep#
pykep provides pre-assembled components that reproduce the manually derived objects above.
In practice, these are preferred for robust workflows, while the manual derivation is useful for understanding and debugging.
# The Taylor integrator
ta = _pk.ta.get_peq(1e-16, _pk.optimality_type.MASS)
# The Variational Taylor integrator
ta = _pk.ta.get_peq_var(1e-16, _pk.optimality_type.MASS)
# The Hamiltonian
H_func = _pk.ta.get_peq_H_cfunc(_pk.optimality_type.MASS)
# The switching function
SF_func = _pk.ta.get_peq_SF_cfunc(_pk.optimality_type.MASS)
# The magnitude of the throttle
u_func = _pk.ta.get_peq_u_cfunc(_pk.optimality_type.MASS)
# The thrust direction
i_vers_func = _pk.ta.get_peq_i_vers_cfunc(_pk.optimality_type.MASS)
# The dynamics cfunc
dyn_func = _pk.ta.get_peq_dyn_cfunc(_pk.optimality_type.MASS)
Solving in single shooting#
The previous section was primarily pedagogical. From here onward, we use dedicated pykep classes.
As a first test case, we use the same simple transfer as the Cartesian mass-optimal notebook. The case is well conditioned, so we can start directly with small \(\epsilon\) and solve without continuation.
A harder case requiring continuation can be treated with the same workflow.
# Testcase 1
posvel0 = [
[34110913367.783306, -139910016918.87585, -14037825669.025244],
[29090.9902134693, 10000.390168313803, 1003.3858682643288],
]
posvelf = [
[-159018773159.22266, -18832495968.945133, 15781467087.350443],
[2781.182556622003, -28898.40730995848, -483.4533989771214],
]
tof = 250
mu = _pk.MU_SUN
eps = 1e-5
T_max = 0.6
Isp = 3000
m0 = 1500
n_rev=0
# Testcase based on Jiang's paper: https://doi.org/10.2514/1.52476
#eq0 = [149654984885.857604980468750, -0.003159967920532, 0.016705492433629, 0.000007081860749, 0.000002593720250, 0.240005388978809]
#eqf = [108204221662.185256958007812, -0.004499485159298, 0.005049416150669, 0.006838004167958, 0.028831463943950, 2.045599177147440]
#
#m0 = 1500.0
#mu = 1.32712440018e20
#T_max = 0.33
#Isp = 3800.0
#g0 = 9.80665
#tof = 1000.0
#eps = 1.e-5
#n_rev=4 #3,4,5 possible
#
#posvel0 = pk.mee2ic(eq0, mu)
#posvelf = pk.mee2ic(eqf, mu)
We instantiate the shooting method using the UDP provided by pykep:
udp = _pk.trajopt.pontryagin_equinoctial_mass(
posvel0=posvel0,
posvelf=posvelf,
tof=tof,
mu=mu,
eps=eps,
lambda0 = None, # use 0.3 in case no normalization is seeked.
T_max=T_max,
Isp=Isp,
m0=m0,
n_rev = n_rev,
L=_pk.AU,
MU=mu,
MASS=m0,
with_gradient=True,
taylor_tolerance=1e-10, # lower tolerances with multiple rev can be an issue
taylor_tolerance_var=1e-4,
)
prob = pg.problem(udp)
prob.c_tol = 1e-6
The resulting TPBVP can be solved with interior-point optimizers or root-finding methods on boundary residuals.
Here we use IPOPT (via pagmo) and a MINPACK wrapper (via scipy.optimize.root).
ip = pg.ipopt()
ip.set_numeric_option("tol", 1e-9) # Relative convergence tolerance
ip.set_integer_option("max_iter", 50) # Maximum iterations
ip.set_integer_option("print_level", 0) # Suppress IPOPT console output
ip.set_string_option(
"sb", "yes"
)
ip.set_string_option(
"nlp_scaling_method", "none"
) # Disable IPOPT automatic scaling
ip.set_string_option(
"mu_strategy", "adaptive"
) # Adaptive barrier update strategy
ipopt = pg.algorithm(ip)
MINPACK is available via scipy and is missing in the current pygmo version, but we can quickly provide a wrapper as a UDA:
class my_solver:
def __init__(self, gradient):
self.gradient = gradient
def evolve(self, pop: pg.population):
from scipy.optimize import root
prob = pop.problem
x0 = pop.champion_x
n = pop.problem.get_nx()
if self.gradient:
res = root(lambda x: prob.fitness(x)[1:], x0, method="hybr", tol=1e-8, options = {"factor": 1., "diag": [1]*8}, jac=lambda x: prob.gradient(x).reshape(n,n)) # factor=1.0 is critical for robustness
else:
res = root(lambda x: prob.fitness(x)[1:], x0, method="hybr", tol=1e-8, options = {"factor": 1., "diag": [1]*8}) # factor=1.0 is critical for robustness
pop.set_x(0, res["x"])
return pop
def get_name(self):
return "Minpack hybrd routine"
minpack = pg.algorithm(my_solver(False))
minpack_g = pg.algorithm(my_solver(True))
We use a multi-start strategy, which is generally good practice for indirect shooting due to sensitivity to initialization. In this easy case, multiple starts are mainly used to report robustness.
def multistart(algo, n_trials=50):
masses = []
xs = []
total_time = 0.0
success=0
for i in range(n_trials):
pop = pg.population(prob,1)
time_start = time.time()
pop = algo.evolve(pop)
time_end = time.time()
total_time += time_end - time_start
if prob.feasibility_f(pop.champion_f):
print(".", end="")
udp.fitness(pop.champion_x)
xs.append(pop.champion_x)
masses.append(udp.ta.state[6])
success+=1
else:
print("x", end="")
if masses:
print(f"\nFinal mass is: {masses[0]*udp.MASS}")
print(f"Hamiltonian at the final point is: {H_func(udp.ta.state, pars=udp.ta.pars)} \n")
print(f"Total time to success: {total_time:.3f} seconds")
print(f"Number of successes: {success} over {n_trials} trials ({success/n_trials*100:.1f} %)")
else:
print("\nNo success")
return pop
pop = multistart(ipopt, n_trials=10)
******************************************************************************
This program contains Ipopt, a library for large-scale nonlinear optimization.
Ipopt is released as open source code under the Eclipse Public License (EPL).
For more information visit https://github.com/coin-or/Ipopt
******************************************************************************
x.x......x
Final mass is: 1259.9008822015971
Hamiltonian at the final point is: [-0.03600518]
Total time to success: 7.888 seconds
Number of successes: 7 over 10 trials (70.0 %)
pop = multistart(minpack_g, n_trials=10)
.x..xxx.x.
Final mass is: 1259.9008822019687
Hamiltonian at the final point is: [-0.03600518]
Total time to success: 1.640 seconds
Number of successes: 5 over 10 trials (50.0 %)
ax = udp.plot(pop.champion_x)
ax.view_init(90,0)
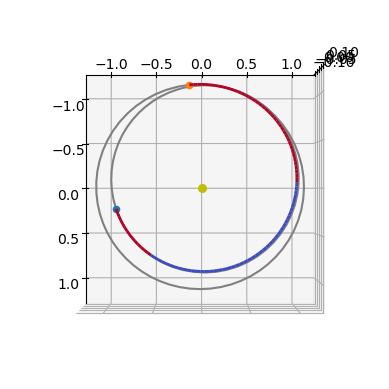
In these plots, thrust arcs are shown in red and coast (ballistic) arcs in blue.
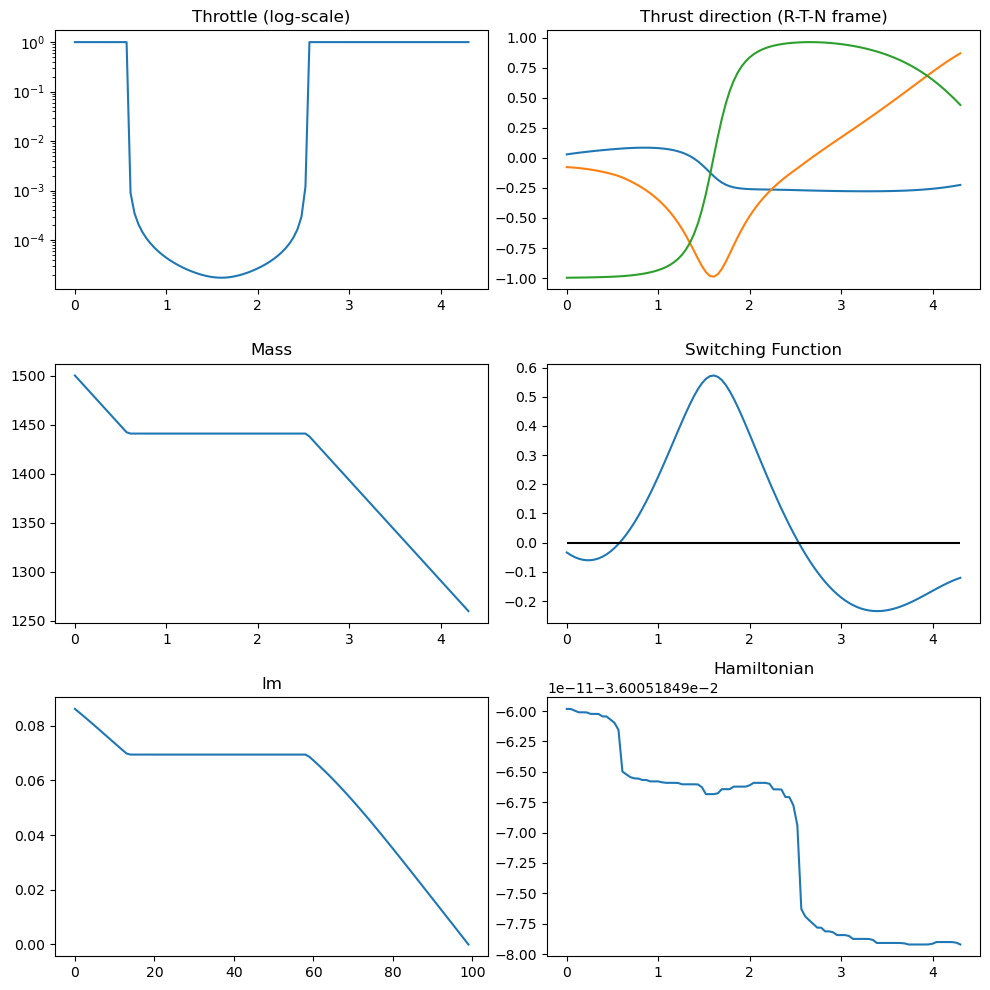
udp.plot_misc(pop.champion_x);