Rastrigin#
-
struct rastrigin#
The Rastrigin problem.
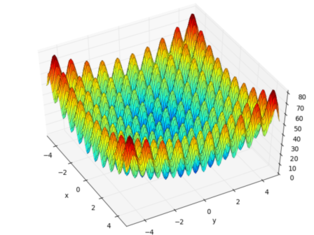
This is a scalable box-constrained continuous single-objective problem. The objective function is the generalised n-dimensional Rastrigin function:
\[ F\left(x_1,\ldots,x_n\right) = 10 \cdot n + \sum_{i=1}^n x_i^2 - 10\cdot\cos\left( 2\pi \cdot x_i \right), \quad x_i \in \left[ -5.12,5.12 \right]. \]Gradients (dense) are also provided as:
\[ G_i\left(x_1,\ldots,x_n\right) = 2 x_i + 10 \cdot 2\pi \cdot\sin\left( 2\pi \cdot x_i \right) \]And Hessians (sparse as only the diagonal is non-zero) are:\[ H_{ii}\left(x_1,\ldots,x_n\right) = 2 + 10 \cdot 4\pi^2 \cdot\cos\left( 2\pi \cdot x_i \right) \]The global minimum is in the origin, where \( F\left( 0,\ldots,0 \right) = 0 \).Public Functions
-
rastrigin(unsigned dim = 1u)#
Constructor from dimension.
Constructs a Rastrigin problem
- Parameters
dim – the problem dimensions.
- Throws
std::invalid_argument – if
dimis < 1
-
vector_double fitness(const vector_double&) const#
Fitness computation.
Computes the fitness for this UDP
- Parameters
x – the decision vector.
- Returns
the fitness of
x.
-
std::pair<vector_double, vector_double> get_bounds() const#
Box-bounds.
It returns the box-bounds for this UDP.
- Returns
the lower and upper bounds for each of the decision vector components
-
vector_double gradient(const vector_double&) const#
Gradients.
It returns the fitness gradient for this UDP.
The gradient is represented in a sparse form as required by problem::gradient().
- Parameters
x – the decision vector.
- Returns
the gradient of the fitness function
-
std::vector<vector_double> hessians(const vector_double&) const#
Hessians.
It returns the hessians for this UDP.
The hessians are represented in a sparse form as required by problem::hessians().
- Parameters
x – the decision vector.
- Returns
the hessians of the fitness function
-
std::vector<sparsity_pattern> hessians_sparsity() const#
Hessians sparsity (only the diagonal elements are non zero)
It returns the hessian sparisty structure for this UDP.
The hessian sparisty is represented in the form required by problem::hessians_sparsity().
- Returns
the hessians of the fitness function
-
inline std::string get_name() const#
Problem name.
- Returns
a string containing the problem name
-
vector_double best_known() const#
Optimal solution.
- Returns
the decision vector corresponding to the best solution for this problem.
Public Members
-
unsigned m_dim#
Problem dimensions.
-
rastrigin(unsigned dim = 1u)#